产品分类
知道问答
回顾您的流量传感选项有哪九种
发布日期:2022-03-08 10:01:55 来源: 作者: 浏览次数:
【导读】:流量传感器用于在许多监测和控制应用中测量气体和液体的流量。流动可以有多种定义(例如,质量、体积、层流、湍流)。物质流动的量(质量流量)通常是感兴趣的,如果流体的密度是恒定的,体积流量测量通常是最容易执行的。......
流量传感器用于在许多监测和控制应用中测量气体和液体的流量。流动可以有多种定义(例如,质量、体积、层流、湍流)。物质流动的量(质量流量)通常是感兴趣的,如果流体的密度是恒定的,体积流量测量通常是非常容易执行的。一些技术适用于气体和液体流动;其他人则特定于他们正在测量的内容。
流速通常通过首先测量管道、导管或其他结构中的流体速度,然后乘以测量点处的已知横截面积来获得。本文将研究用于测量气体和/或液体流量的九种非常常用的技术和设备。
1. 热风速计
热(或“热线”)风速计的工作原理是,流动流体从加热的温度传感器中带走的热量与流体的速度有关。这些传感器通常使用第二个未加热的温度传感器来补偿空气温度的变化。热线传感器可用作用于测试目的的单点仪器,或用于固定安装的多点阵列。这些传感器在低气流测量方面优于差压类型,通常适用于 50 至 12,000 fpm 的空气速度。
2. 差压传感器
差压流量计是使用中非常常见的装置类型,特别是对于液体。它们的操作基于这样的概念,即仪表上的压降与流量的平方成正比。通过测量压差并取平方根来找到流速。
与大多数流量计一样,这些设备具有两个元件。主要元素导致动能变化,从而在管道中产生压差。该单位必须与管道尺寸、流动条件和被测液体的特性正确匹配。此外,元件的测量精度必须在合理范围内保持良好。次级元件测量压差并输出转换为实际流量值的信号。
对于气流测量,常见的差压流量装置包括皮托管
皮托管由两根管子组成,用于测量管道内不同位置的压力。一根管子测量静压,通常在管壁处;其他测量冲击压力(静压加速度压头)。流速越快,冲击压力越大。皮托管使用冲击压力和静压之间的差异来计算流量。皮托管成本低,但缺点是只能测量单点流量,必须安装在非常大流量点。速度曲线的变化会导致重大错误。它们也容易堵塞。平均皮托管有多个端口用于测量多个位置的流量,这使得可以考虑不断变化的速度曲线(图 2)。
一些基于差压的流量测量系统包括能够以电子方式提取测量压力的平方根并提供相对于速度呈线性的信号的变送器。其他提供与测量压力成比例的信号,并依赖控制系统来计算平方根。一旦获得速度,就可以通过乘以管道的横截面积来找到流量。压力变送器的量程和分辨率限制了速度范围。大多数差压装置的非常小速度限制在 400–600 fpm 范围内。非常大速度仅受传感器耐用性的限制。
为了测量液体流量,差压流量装置通常测量速度压力(插入管类型),或通过已知限制的压降。孔板、流量喷嘴、文丘里管和皮托管是常用的限制类型。
插入管传感器通常由一根管子组成,该管子在流动流的宽度上具有多个开口,给出了穿过管子的平均速度差,以及一个位于上游和下游开口之间的内部挡板,用于获得压差。这些仪表具有较低的yongjiu压力损失,可以满足许多常见应用。
同心孔板(图 3 )是非常简单且成本非常低的差压装置。孔板限制流体的流动并在孔板上产生压差,从而导致上游的高压和下游的低压与流速的平方成正比。孔板通常比其他流量元件产生更大的总压力损失。
文丘里管(图 4)是非常大和非常昂贵的差压装置。它们通过逐渐缩小管道直径并测量由此产生的压降来工作。然后膨胀部分将流量返回到其原始压力附近。与孔板一样,差压测量值被转换为相应的流量。文丘里管通常用于需要低压降和高精度读数的大直径管道应用。
流量喷嘴 实际上是文丘里管的变体,喷嘴开口是流量中的椭圆形限制,但没有用于压力恢复的出口区域。测压口位于下游约二分之一管径和上游一管径处。
流量喷嘴是一种高速流量计,用于高湍流(雷诺数高于 50,000)的地方,如蒸汽流量应用。流量喷嘴的压降介于文丘里管和孔板之间(30%–95%)。
差压仪表的优点包括成本低、操作和安装简单以及经过验证的性能。这是一个很好理解的技术。缺点可能是yongjiu性压力损失、污垢积聚和堵塞、某些装置的大尺寸和笨重,以及它们不适合与某些类型的流体一起使用。
3. 涡流传感器
这些传感器根据 von Kármán 原理运行:当流体在障碍物(钝物)周围流动时,涡流或涡流会在物体下游交替流出。涡旋脱落的频率与流体的速度成正比。单个传感器用于小型管道,传感器阵列应用于较大的管道,与其他类型的气流测量仪器一样。它们通常用于 350–6000 fpm 范围内的风速,同样适用于流速或总流量测量。不建议与浆料或高粘度流体一起使用。
4. 容积式流量传感器
这些流量测量设备用于需要在高量程比(设备的全范围与非常小可测量流量的比率)下的高精度并且一些yongjiu压力损失不会导致过多能量消耗的情况。它们通过将液体分成测量的部分然后继续移动来操作。然后连接寄存器对每个段进行计数。它们适用于粘性液体流动或需要单个机械仪表的地方。容积式流量计的常见类型包括叶片式和齿轮式、章动盘式、旋转叶片式和摆动活塞式流量计。仪表通常由黄铜、青铜和铸铁等金属制成,但也可以由工程塑料制成,具体取决于应用。
由于这些传感器要求其运动部件之间具有紧密的公差,因此流动中的悬浮固体会导致机械问题。这些仪表配有流量指示器和可手动读取的累加器。这些设备相对昂贵。
5. 基于涡轮的流量传感器
涡轮式和螺旋桨式仪表使用的原理是,流经涡轮或螺旋桨的液体将导致转子以与流量直接相关的速度旋转。可以对电脉冲进行计数和总计。这些设备有全通径、管道安装版本和插入类型,其中只有一部分被测量的流量通过旋转元件。涡轮流量计在正确指定和安装后可提供良好的精度,尤其是对于低粘度流体。插入类型用于不太重要的应用程序。它们通常更容易维护和检查,因为它们可以在不干扰主管道的情况下移除。
6. 质量流量计
需要更精确的流量测量的与质量相关的过程(例如化学反应和传热)导致了质量流量计的发展。有多种设计可供选择,但非常常见的是科里奥利仪表,它基于一种称为科里奥利力的现象。科里奥利仪表是真正的质量仪表,可直接测量质量流量,而不是测量体积流量。由于质量不变,仪表是线性的,无需针对液体特性的变化进行调整。此外,这些设备不需要对不断变化的温度和压力条件进行补偿。这些仪表特别适用于测量在给定温度和压力下粘度随速度变化的液体。
科里奥利仪表有多种设计可供选择。一种流行的设备包括一个 U 形流量管,该流量管封装在与电子单元相连的传感器外壳中。传感单元可以直接安装到任何过程中,电子单元可以位于距离传感器 500 英尺的地方。在外壳内部,管子通过管子弯曲处的磁性装置以其固有频率振动。这类似于音叉的振动,覆盖 <0.1 英寸并完成约 80 次/秒的完整周期。当流体流过管子时,它被迫承担管子的垂直运动。这反过来又导致流体对管施加力,使其扭曲。扭转量与流过管子的液体的质量流量成正比。流量管两侧的磁性传感器测量内部速度,内部速度会随着管子的扭曲而变化。传感器将信息馈送到电子单元,电子单元对其进行处理并将其转换为与质量流量成比例的电压。该流量计具有广泛的应用范围,从粘合剂和涂料到液氮。
7. 电磁流量传感器
这些传感器的操作(图 5)基于法拉第电磁感应定律,即当导体穿过磁场时会感应出电压。液体是导体,磁场由流量管外的通电线圈产生。产生的电压与流量成正比。安装在管壁上的电极感应感应电压,该感应电压由次级元件测量。
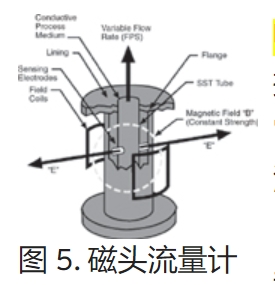
电磁流量计用于测量需要高质量、低维护系统的导电液体(包括水)的流量。与其他类型相比,电磁流量计的成本较高,但它们的重要用途包括测量困难和腐蚀性液体和浆液,以及逆流测量。
8. 超声波流量传感器
超声波流量传感器可分为多普勒传感器和传输(或行程时间)传感器。多普勒传感器测量由液体流动引起的频移。两个传感器安装在连接到管道一侧的外壳中,一个已知频率的信号被传送到要测量的液体。液体中的气泡、固体或任何其他不连续性会导致脉冲向接收器元件反射。因为引起反射的液体在移动,所以返回脉冲的频率与液体的速度成比例地变化。
对于运输仪表,传感器安装在管道的任一侧,以便在设备之间传播的声波与流动方向成 45° 角。在传感器之间移动的信号的速度随着传输方向和被测液体的速度而增加或减少。通过在两个方向交替传输信号,可以获得与流量成比例的时间-微分关系。这种类型的传感器的一个限制是,被测量的液体必须相对不含固体或夹带的气体,以非常大限度地减少信号散射和吸收。
超声波流量计是非侵入式的,成本适中。许多型号设计用于夹在现有管道上。
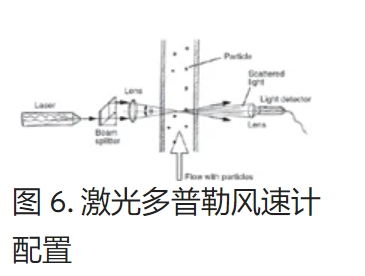
9. 激光多普勒风速计
激光多普勒风速计 (LDA) 是一种广泛使用且成熟的技术,用于液体和气体中的流体动力学测量。LDA 的方向灵敏度和非侵入性使其可用于具有反向流动、化学反应或高温介质以及旋转机械的应用,其中物理传感器可能难以或不可能使用。然而,这种技术确实需要流动中的示踪粒子。
LDA 为流量测量提供的主要优势包括:
1.非接触式
2.无需校准
3.测量距离范围从厘米到米
4.速度范围从零到超音速
5. 测量逆流
6. 高时空分辨率
LDA 的基本配置(图 6)包括:
1. 连续波激光器
2. 透射光学器件,包括分束器和聚焦透镜
3. 接收光学器件,由聚焦透镜、干涉滤光片和光电探测器组成
4.信号调节器和信号处理器
通常,LDA 向目标发射单色激光束并收集反射的辐射。根据多普勒效应,反射辐射波长的变化是目标物体相对速度的函数。因此,可以通过测量反射激光波长的变化来找到速度。这是通过叠加原始信号和反射信号形成干涉条纹图案(明暗条纹图案)来实现的。
布拉格单元通常用作分束器。这是附有振动压电晶体的玻璃晶体。振动产生声波,其作用类似于光学网格。两束强度相等的光束从布拉格单元射出,频率为 f0 和 fSHIFT,它们被聚焦到光纤中,将它们带到探头。在探头中,来自光纤的平行出射光束由透镜聚焦,在称为测量体积的区域相交。由于激光束之间的干涉会调制光强度,从而产生称为条纹的高光强度平行平面。条纹距离 df 由激光的波长和光束之间的角度定义:
流速信息来自流体中携带的微小“种子”粒子在通过测量体积时散射的光。散射光包含多普勒频移,即多普勒频率 fD,它与垂直于两个激光束等分线的速度分量成正比,对应于测量体积的 X 轴。
接收器透镜收集散射光并将其聚焦在光电探测器上。安装在光电探测器前面的干涉滤光片仅通过所需的波长,从而消除环境光和其他波长的噪声。光电探测器将波动的光强度转换为电信号,即多普勒脉冲。多普勒脉冲在信号处理器中被过滤和放大,通常通过使用快速傅里叶变换算法的频率分析来确定每个粒子的 fD。
条纹间距 df 提供有关粒子行进距离的信息。多普勒频率 fD 提供有关时间的信息: t = 1/fD 。由于速度等于距离除以时间,因此速度的表达式变为:
在粒子播种中,液体通常含有足够的自然播种,但通常必须播种气体。理想情况下,粒子应该足够小以跟随流动,但足够大以散射足够的光以在光电探测器输出处获得良好的信噪比。颗粒的尺寸范围通常为 1-10 μm。颗粒材料可以是固体(粉末)或液体(液滴)。
注明:淮安三畅仪表文章均为原创,转载请标明本文地址http://www.sanchang168.com/
上一篇文章:为什么我们需要使用VFD驱动器来控制运动?
下一篇文章:涡街流量计和涡轮流量计的区别是什么
相关的产品










与“ "相关的内容

- 商务部:推进对鼓励外商投资项目的进口设备2023-11-18
- 蒸汽换热站装置仪表选型方法2023-10-19
- 在食品加工过程中泵送颗粒是否存在问题2022-03-30
- 确保精细化工行业的安全性和可持续性2022-03-30
- 超声波流量计在天然气计量中的应用探析2022-03-30
- 如何测量罐中两种液体之间的界面2022-03-25